Artifacts of Numerical Integration in Learning Dynamical Systems
Paper: https://arxiv.org/abs/2507.14491. Homepage: Project page.
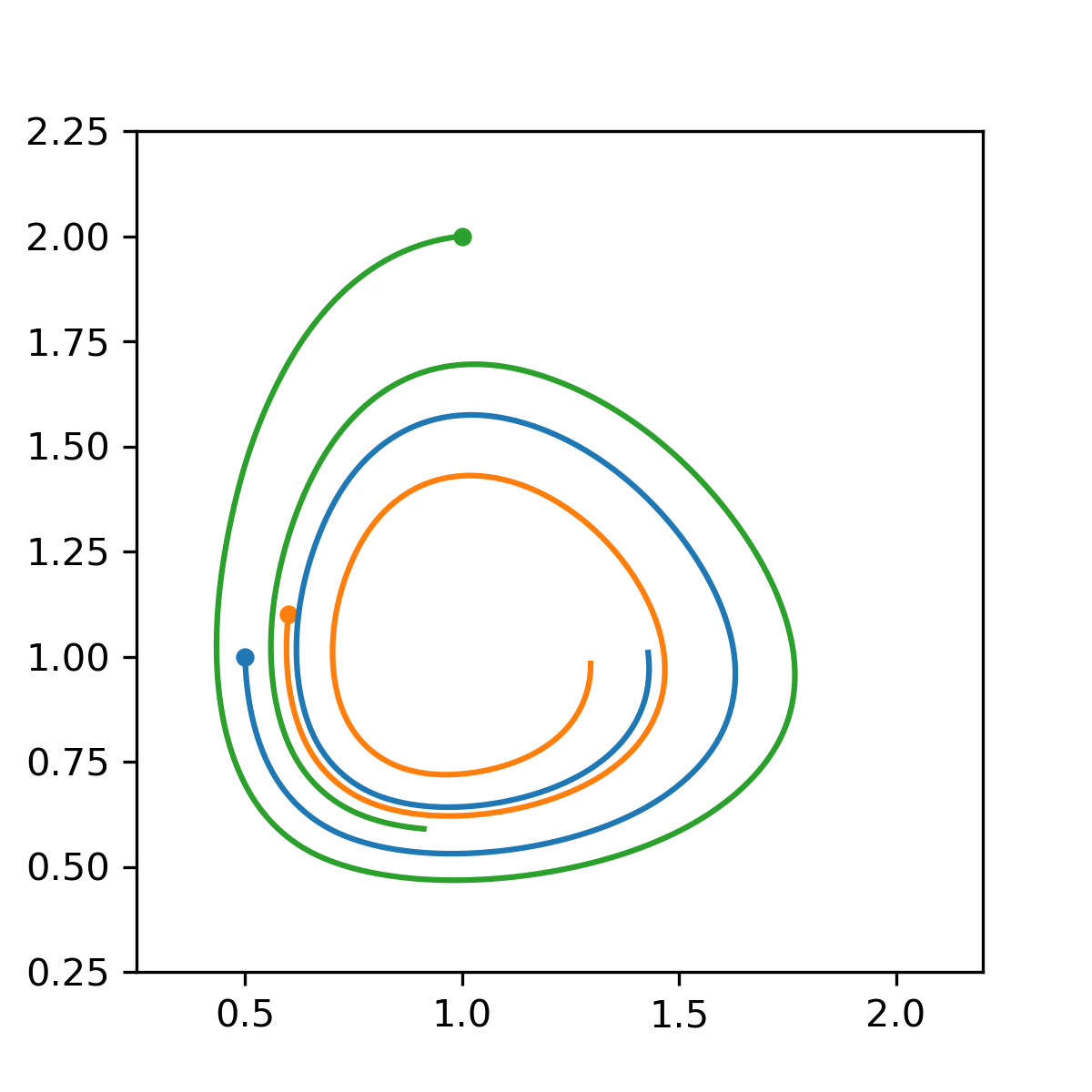
When learning a dynamical system from data, the numerical integrator inside the training loop silently shapes what is learned. A damped oscillator can be confidently identified as anti-damped; a conservative predator–prey model can be learned with spurious dissipation. The key insight is that different integrators (forward Euler, RK4, implicit midpoint) have different stability regions, and the optimizer finds parameters that satisfy the discrete map — not the continuous-time ODE. The fix is to use a structure-preserving integrator whose stability region matches the left half complex plane, such as the implicit midpoint rule.
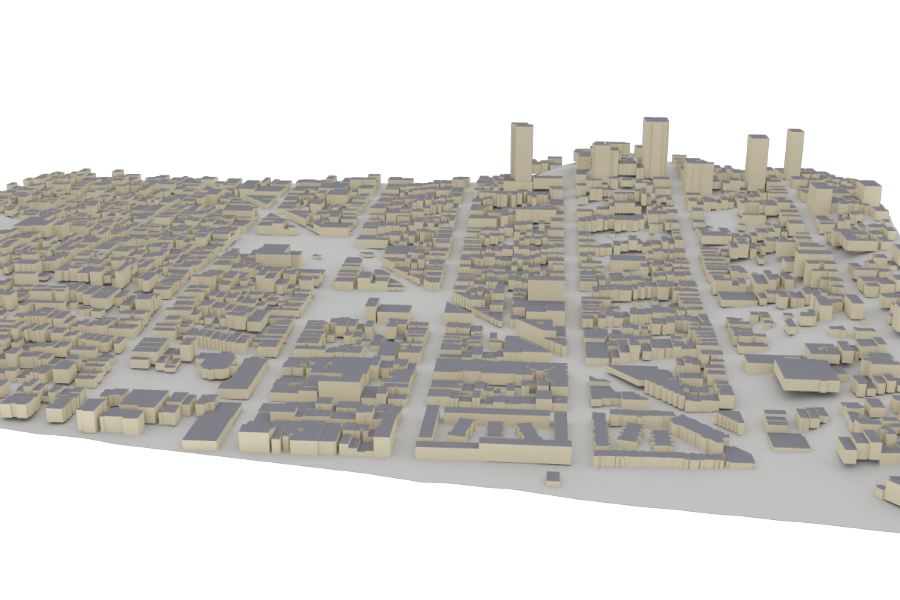
Optimal 6G Transmitter Placement in Realistic Urban Environments
Paper: https://arxiv.org/abs/2604.28153. Homepage: Project page.
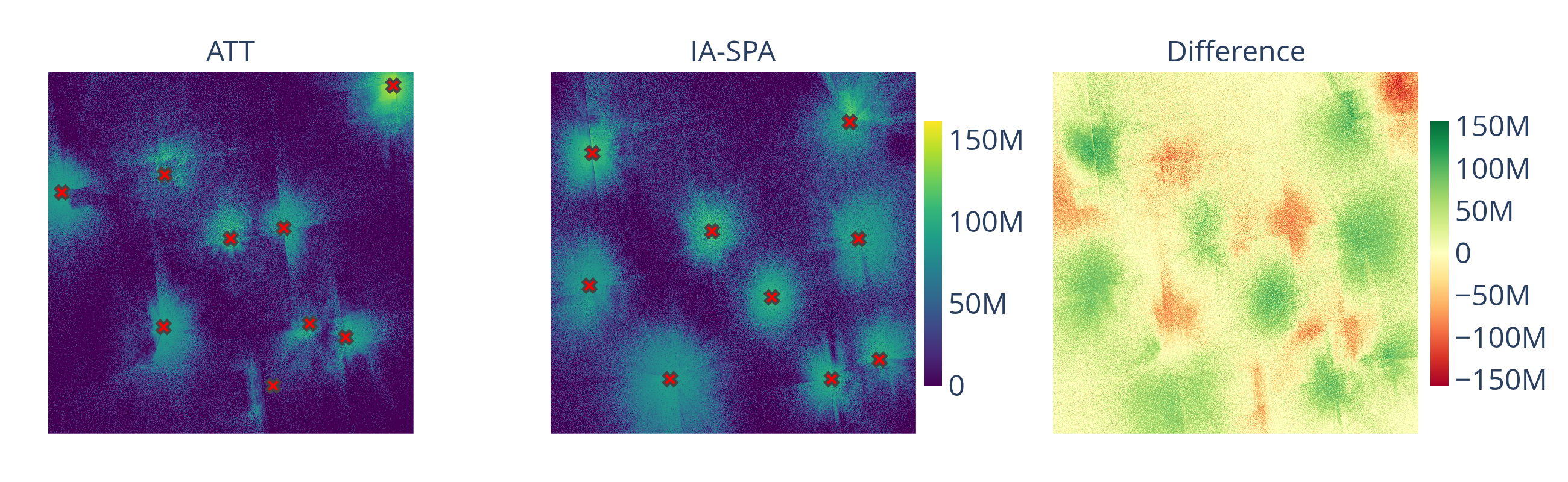
| Metric | AT&T Baseline | IA-SPA | Change |
|---|---|---|---|
| Throughput [MBps] | |||
| Mean Rate | 21.17 | 36.12 | +70.62% |
| Edge Rate (5th pct.) | 3.57 | 8.38 | +134.58% |
| Interference [nW] | |||
| Mean Interference | 2.24 | 2.19 | −2.04% |
| Max Interference | 495.86 | 473.93 | −4.42% |
Pursuit-evasion game of Reeds-Shepps cars using Deep Learning
Papers: https://arxiv.org/abs/2406.10758 .
Demos: